Bài 2: Một số dao động điều hoà thường gặp
Nội dung lý thuyết
Các phiên bản khácI. CON LẮC ĐƠN
1. Cấu tạo của con lắc đơn
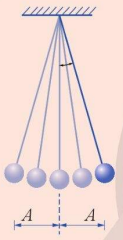
Con lắc đơn gồm một vật nhỏ, khối lượng \(m\), treo ở đầu một sợi dây hoặc một thanh nhẹ không giãn có chiều dài \(l\). Khi vật ở vị trí cân bằng, dây treo có phương thẳng đứng. Con lắc đơn được biểu diễn trong Hình 2.1 sẽ thực hiện dao động điều hoà sau khi quả cầu được kéo lệch khỏi vị trí cân bằng một đoạn nhỏ rồi buông tay.
2. Chu kì của con lắc đơn
Người ta đã chứng minh được chu kì dao động của con lắc đơn không phụ thuộc vào biên độ dao động mà chỉ phụ thuộc vào chiều dầu đây treo và gia tốc rơi tự do tại nơi treo con lắc :
\(T=2\pi\sqrt{\dfrac{l}{g}}\)
Trong đó, \(l\) là chiều dài dây treo, đơn vị đo là m.
\(g\) là gia tốc rơi tự do tại nơi treo con lắc, đơn vị đo là m/s².
\(T\) là chu kì dao động của con lắc, đơn vị đo là s.
II. CON LẮC LÒ XO
1. Cấu tạo của con lắc lò xo
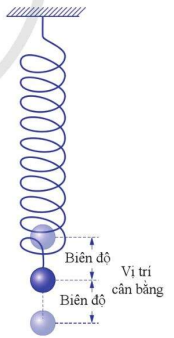
Treo một vật nhỏ vào đầu dưới của một lò xo, đầu trên của lò xo gắn cố định (Hình 2.3). Khi vật đứng yên, lò xo dãn ra một đoạn. Tại vị trí đó, lực đàn hồi của lò xo cân bằng với trọng lực tác dụng lên vật. Ta gọi vị trí của vật khi đó là vị trí cân bằng. Nâng vật khỏi vị trí cân bằng theo phương thẳng đứng một đoạn rồi buông tay, vật sẽ dao động xung quanh vị trí cân bằng.
Vật nhỏ và lò xo có một đầu gắn cố định như vậy tạo thành một hệ dao động, gọi là con lắc lò xo.
2. Chu kì của con lắc lò xo
Dao động của con lắc lò xo là dao động điều hoà theo phương trình \(T=2\pi\sqrt{\dfrac{l}{g}}\), với chu kì được xác định bằng :
\(T=2\pi\sqrt{\dfrac{m}{k}}\)
Trong đó:
\(k\) là độ cứng của lò xo, đơn vị đo là N/m.
\(m\) là khối lượng của vật gắn với lò xo, đơn vị đo là kg.
\(T\) là chu kì dao động của con lắc, đơn vị do là s.
Ta thấy rằng, chu kì dao động của cả con lắc lò xo và con lắc đơn đều không phụ thuộc vào biên độ dao động mà chỉ phụ thuộc vào đặc điểm cấu tạo của các con lắc.
III. VẬN DỤNG CÁC PHƯƠNG TRÌNH CỦA DAO ĐỘNG ĐIỀU HOÀ
Ví dụ : Đồ chơi thú nhún như trong Hình 2.4 là một con lắc lò xo thẳng đứng. Trong đó, lò xo có độ cứng \(k\) = 150 N/m và khối đầu gắn trên lò xo có khối lượng \(m\) = 0,15 kg. Khi con lắc đang ở vị trí cân bằng, dùng búa gõ nhẹ vào khối đầu thú nhún theo phương thẳng đứng. Bỏ qua lực cản, con lắc dao động với phương trình :
\(x=1,2cos\left(\omega t+\dfrac{\pi}{2}\right)\)
Trong đó, \(x\) tỉnh bằng cm, \(t\) tính bằng s.
a. Xác định chu kì và tần số góc của con lắc lò xo.
b. Viết phương trình li độ, phương trình vận tốc và phương trình gia tốc của con lắc lò xo này.
c. Xác định li độ, vận tốc và gia tốc của khối đầu thú nhún tại thời điểm \(t\) = 1,5 s.
Bài giải :
a. Xác định chu kì và tần số góc của con lắc lò xo
Chu kì dao động của con lắc lò xo được xác định bằng :\(T=2\pi\sqrt{\dfrac{m}{k}}\)
Thay số, ta có \(T\) = 0,20 s
Tần số góc của con lắc lò xo : \(\omega=\dfrac{2\pi}{T}=\dfrac{2\pi}{0,20}=10\pi\) (rad/s)
b. Viết phương trình li độ, vận tốc và gia tốc của con lắc lò xo
Phương trình li độ của con lắc lò xo là:
\(x=1,2cos\left(10\pi t+\dfrac{\pi}{2}\right)\) (cm)
Trong đó, biên độ dao động \(A\) = 1,2 cm và pha ban đầu
\(\varphi=\dfrac{\pi}{2}\) rad
Phương trình vận tốc của dao động điều hoà có dạng :
\(v=-v_{max}sin\left(\omega t+\varphi\right)\)
Với \(v_{max}=\omega A\).
Thay số, ta có \(v_{max}=12\pi\) cm/s.
Vậy phương trình vận tốc của con lắc lò xo là :
\(v=-12\pi sin\left(10\pi t+\dfrac{\pi}{2}\right)\) (cm/s)
Phương trình gia tốc của con lắc lò xo :
\(a=-\omega^2Acos\left(\omega t+\varphi\right)\)
Thay số, ta có
\(a=-1200cos\left(10\pi t+\dfrac{\pi}{2}\right)\) (cm/s2)
c. Tại thời điểm 1 = 1,5 s, khối đầu thú nhún có:
Li độ
\(x=1,2cos\left(10\pi t+\dfrac{\pi}{2}\right)\) (cm)
Thay số, ta có: \(x\) = 0 cm.
Vận tốc
\(v=-12\pi sin\left(10\pi t+\dfrac{\pi}{2}\right)\) (cm)
\(v=12\pi\) cm/s
Gia tốc
\(a=-1200cos\left(10\pi t+\dfrac{\pi}{2}\right)\) (cm/s2)
\(a=0\) cm/s2
Kết quả tính cho thấy, tại thời điểm \(t\) = 1,5 s, khối đầu thú nhún đang ở vị trí cân bằng, chuyển động với vận tốc cực đại theo chiều dương của trục toạ độ và có gia tốc bằng 0.